Deep Reinforcement Learning
Markov Decision Process
Markov Decision Process (MDP)
- The kind of task that can be solved by RL is called a Markov Decision Process (MDP).
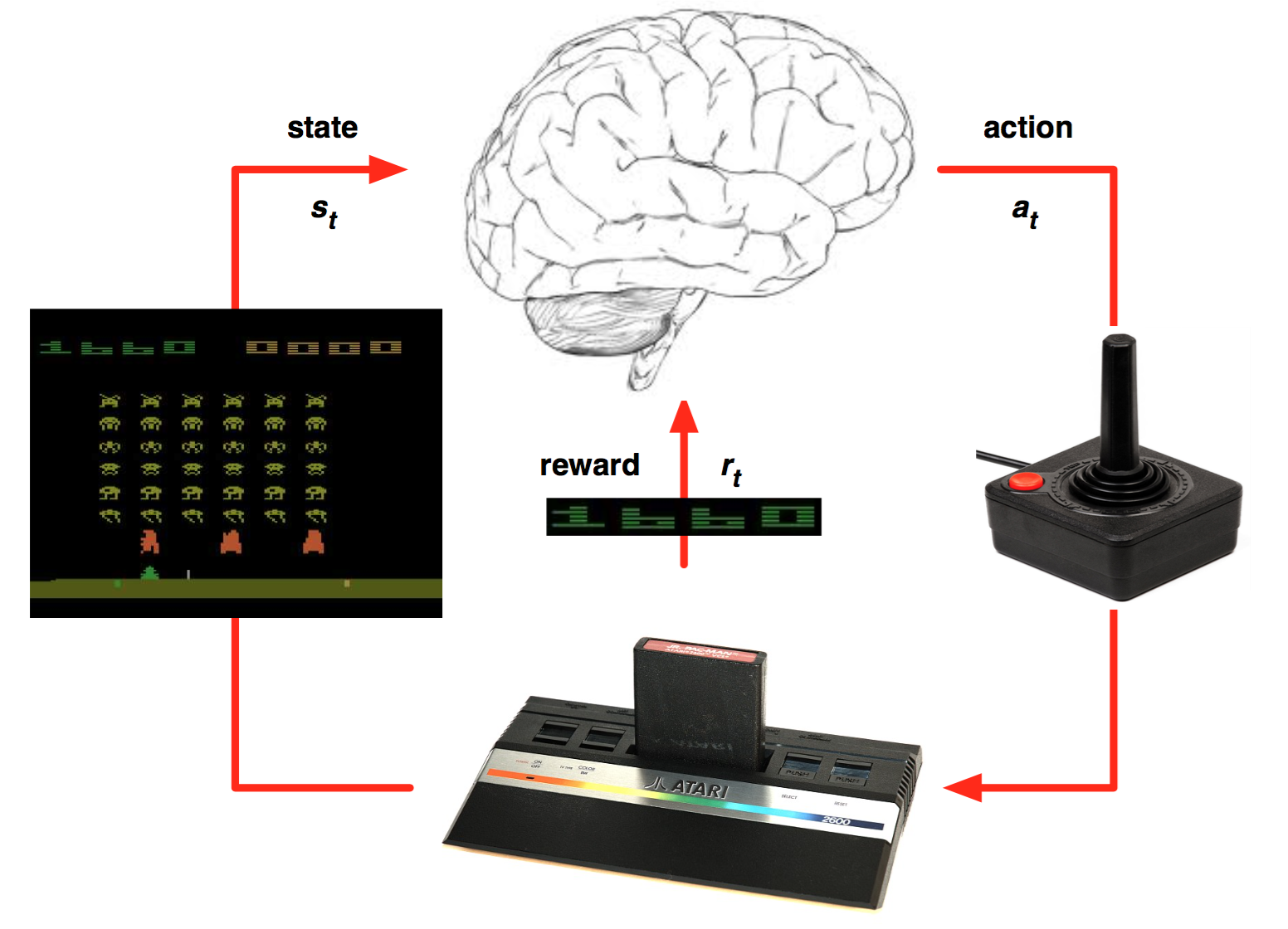
The environment is fully observable, i.e. the current state s_t completely characterizes the process at time t.
Actions a_t provoke transitions between two states s_t and s_{t+1}.
State transitions (s_t, a_t, s_{t+1}) are governed by transition probabilities.
A reward r_{t+1} is (probabilistically) associated to each transition.
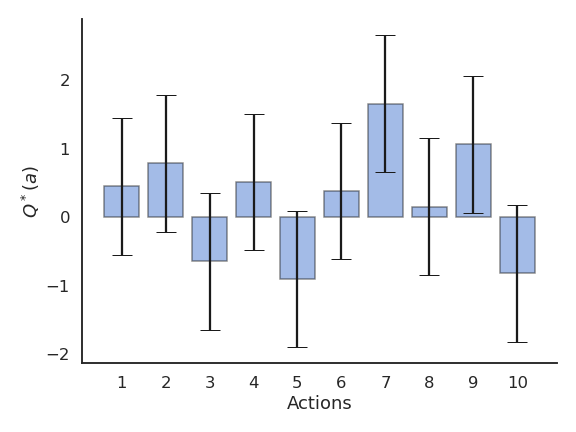
- Note: n-armed bandits are MDPs with only one state.
Finite State Machine (FSM)
A finite state machine (or finite state automaton) is a mathematical model of computation.
A FSM can only be in a single state s at any given time.
Transitions between states are governed by external inputs, when some condition is met.
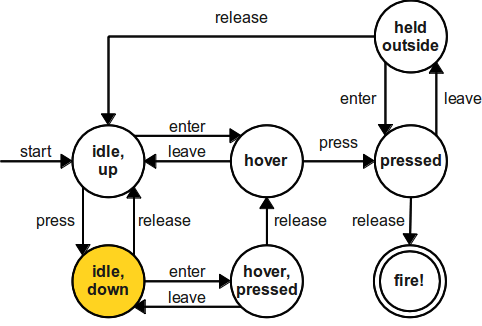
A FSM is fully defined by:
The state set \mathcal{S} = \{ s_i\}_{i=1}^N.
Its initial state S_0.
A list of conditions for each transition.
Usually implemented by a series of if/then/else statements:
if state == "hover" and press == true:
state = "pressed"
elif ...Markov Chain (MC)
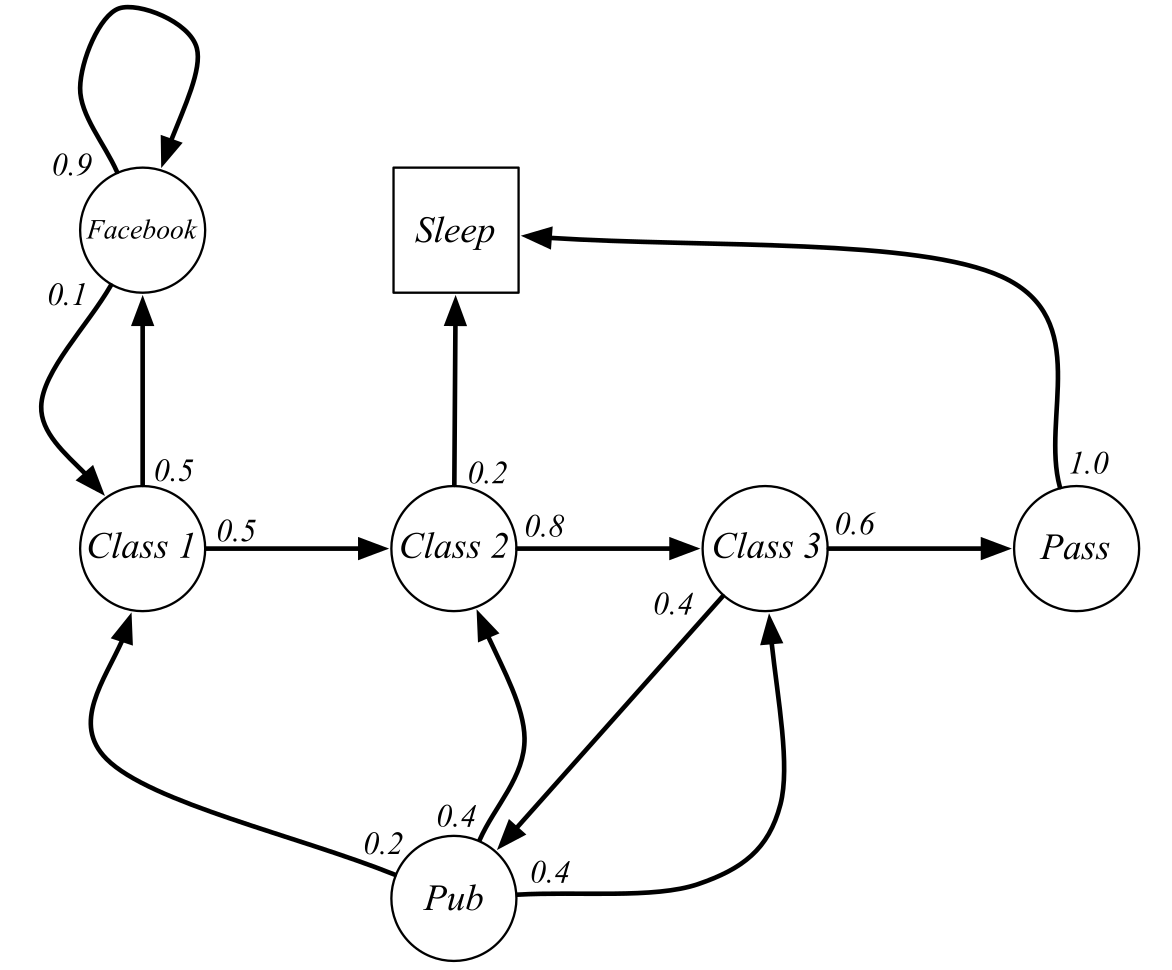
A first-order Markov chain (or Markov process) is a stochastic process generated by a FSM, where transitions between states are governed by state transition probabilities.
A Markov chain is defined by:
The state set \mathcal{S} = \{ s_i\}_{i=1}^N.
The state transition probability function:
\begin{aligned} \mathcal{P}: \mathcal{S} \rightarrow & P(\mathcal{S}) \\ p(s' | s) & = P (s_{t+1} = s' | s_t = s) \\ \end{aligned}
When the states have the Markov property, the state transition probabilities fully describe the MC.
Markov property
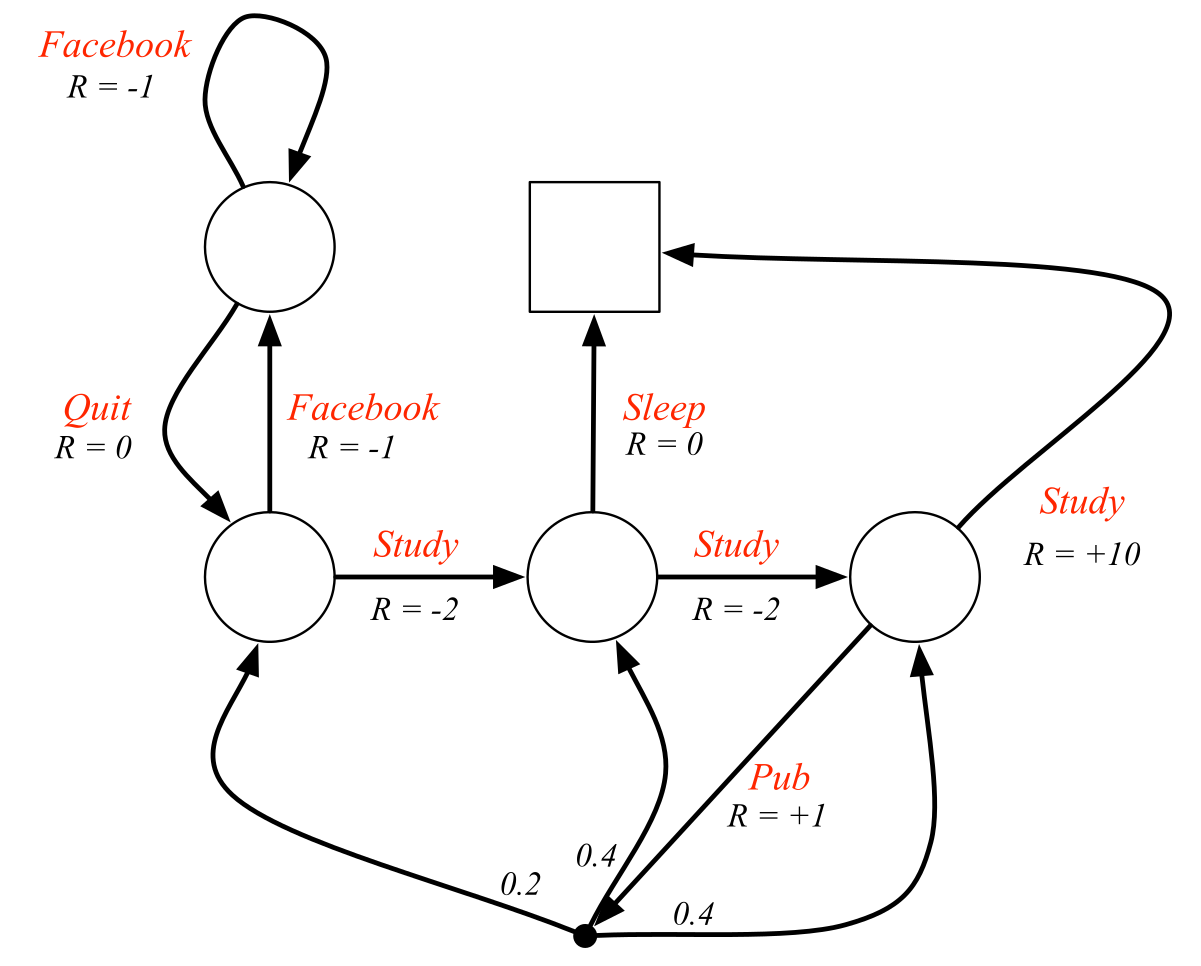
For example, the probability 0.8 of transitioning from “Class 2” to “Class 3” is the same regardless we were in “Class 1” or “Pub” before.
If this is not the case, the states are not Markov, and this is not a Markov chain.
We would need to create two distinct states:
“Class 2 coming from Class 1”
“Class 2 coming from the pub”
State transition matrix
- Supposing that the states have the Markov property, the transitions in the system can be summarized by the state transition matrix \mathcal{P}:
![]()
- Each element of the state transition matrix corresponds to p(s' | s). Each row of the state transition matrix sums to 1:
\sum_{s'} p(s' | s) = 1
- The tuple <\mathcal{S}, \mathcal{P}> fully describes the Markov chain.
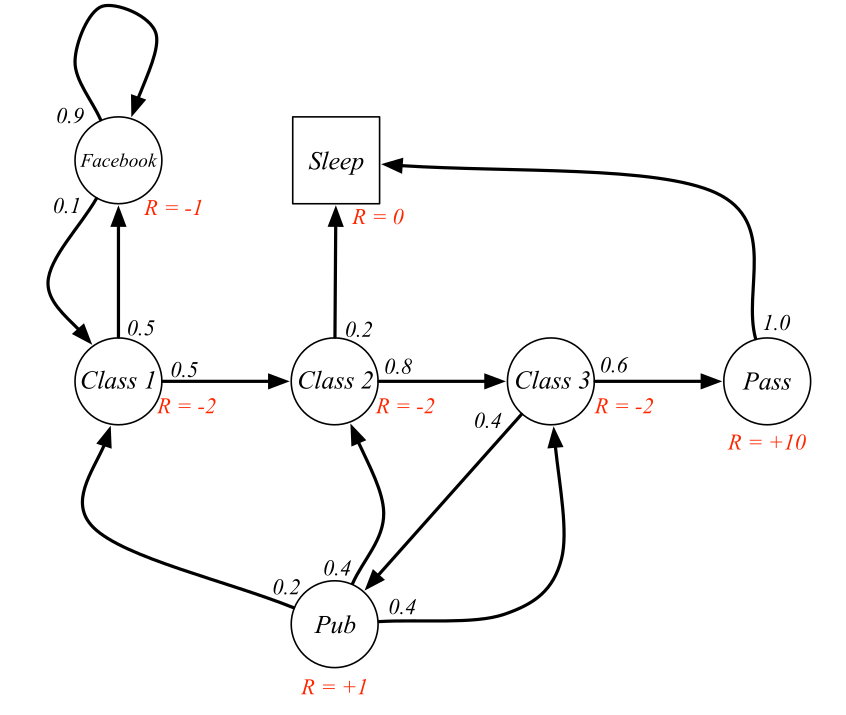
Markov Reward Process (MRP)
A Markov Reward Process is a Markov Chain where each transition is associated with a scalar reward r, coming from some probability distribution.
A Markov Reward Process is defined by the tuple <\mathcal{S}, \mathcal{P}, \mathcal{R}, \gamma>.
The finite state set \mathcal{S}.
The state transition probability function:
\begin{aligned} \mathcal{P}: \mathcal{S} \rightarrow & P(\mathcal{S}) \\ p(s' | s) & = P (s_{t+1} = s' | s_t = s) \\ \end{aligned}
- The expected reward function:
\begin{aligned} \mathcal{R}: \mathcal{S} \times \mathcal{S} \rightarrow & \Re \\ r(s, s') &= \mathbb{E} (r_{t+1} | s_t = s, s_{t+1} = s') \\ \end{aligned}
- The discount factor \gamma \in [0, 1].
Expected reward
- As with n-armed bandits, we only care about the expected reward received during a transition s \rightarrow s' (on average), but the actual reward received r_{t+1} may vary around the expected value.
r(s, s') = \mathbb{E} (r_{t+1} | s_t = s, s_{t+1} = s')
Markov Decision Process (MDP)
Source: David Silver. http://www0.cs.ucl.ac.uk/staff/d.silver/web/Teaching.html
Markov property

Where is the ball going? To the little girl or to the player?
Single video frames are not Markov states: you cannot generally predict what will happen based on a single image.
A simple solution is to stack or concatenate multiple frames:
- By measuring the displacement of the ball between two consecutive frames, we can predict where it is going.
- One can also learn state representations containing the history using recurrent neural networks (see later).
POMDP : Partially-Observable Markov Decision Process
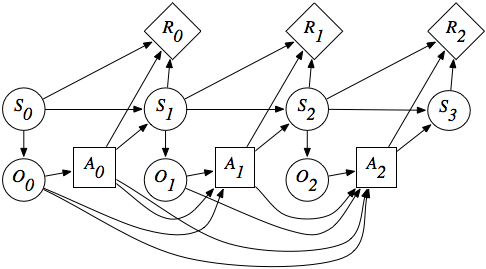
In a POMDP, the agent does not have access to the true state s_t of the environment, but only observations o_t.
Observations are partial views of the state, without the Markov property.
The dynamics of the environment (transition probabilities, reward expectations) only depend on the state, not the observations.
The agent can only make decisions (actions) based on the sequence of observations, as it does not have access to the state directly (Plato’s cavern).
- In a POMDP, the state s_t of the agent is implicitly the concatenation of the past observations and actions:
s_t = (o_0, a_0, o_1, a_1, \ldots, a_{t-1}, o_t)
- Under conditions, this inferred state can have the Markov property and the POMDP is solvable.
Return
- Suppose the sequence of rewards obtained after step t (after being in state s_t and choosing action a_t) is:
r_{t+1}, r_{t+2}, r_{t+3}, ...
- What we want to maximize is the return (reward-to-go) at each time step t, i.e. the sum of all future rewards:
R_t = r_{t+1} + \gamma \, r_{t+2} + \gamma^2 \, r_{t+3} + ... = \sum_{k=0}^{\infty} \gamma^k \, r_{t+k+1}
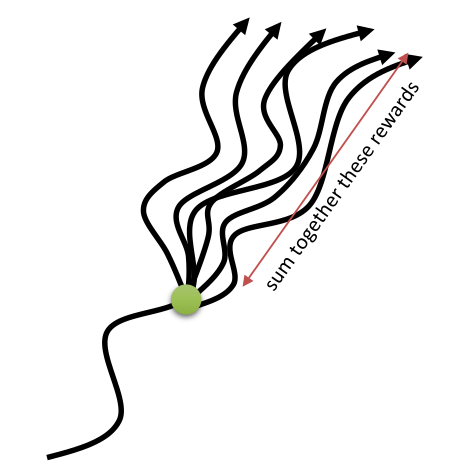
- More generally, for a trajectory (episode) \tau = (s_0, a_0, r_1, s_1, a_1, \ldots, s_T), one can define its return as:
R(\tau) = \sum_{t=0}^{T} \gamma^t \, r_{t+1}

Return

For episodic tasks (which break naturally into finite episodes of length T, e.g. plays of a game, trips through a maze), the return is always finite and easy to compute at the end of the episode.
- The discount factor can be set to 1.
R_t = \sum_{k=0}^{T} r_{t+k+1}
For continuing tasks (which can not be split into episodes), the return could become infinite if \gamma = 1.
- The discount factor has to be smaller than 1.
R_t = \sum_{k=0}^{\infty} \gamma^k \, r_{t+k+1}
The discount rate \gamma determines the relative importance of future rewards for the behavior:
if \gamma is close to 0, only the immediately available rewards will count: the agent is greedy or myopic.
if \gamma is close to 1, even far-distance rewards will be taken into account: the agent is farsighted.
Why the reward on the long term?

Selecting the action a_1 in s_1 does not bring reward immediately (r_1 = 0) but allows to reach s_5 in the future and get a reward of 10.
Selecting a_2 in s_1 brings immediately a reward of 1, but that will be all.
a_1 is better than a_2, because it will bring more reward on the long term.
Why the reward on the long term?
- When selecting a_1 in s_1, the discounted return is:
R = 0 + \gamma \, 0 + \gamma^2 \, 0 + \gamma^3 \, 10 + \ldots = 10 \, \gamma^3
while it is R= 1 for the action a_2.
For small values of \gamma (e.g. 0.1), 10\, \gamma^3 becomes smaller than one, so the action a_2 leads to a higher discounted return.
The discount rate \gamma changes the behavior of the agent. It is usually taken somewhere between 0.9 and 0.999.
Example: the cartpole balancing task
State: Position and velocity of the cart, angle and speed of the pole.
Actions: Commands to the motors for going left or right.
Reward function: Depends on whether we consider the task as episodic or continuing.
Episodic task where episode ends upon failure:
reward = +1 for every step before failure, 0 at failure.
return = number of steps before failure.
Continuing task with discounted return:
reward = -1 at failure, 0 otherwise.
return = - \gamma^k for k steps before failure.
- In both cases, the goal is to maximize the return by maintaining the pole vertical as long as possible.
Example: the recycling robot MDP
At each step, the robot has to decide whether it should:
- actively search for a can,
- wait for someone to bring it a can, or
- go to home base and recharge.
Searching is better (more reward) but runs down the battery (probability 1-\alpha to empty the battery): if the robot runs out of power while searching, he has to be rescued (which leads to punishment and should be avoided).
Decisions must be made on basis of the current energy level: high, low. This will be the state of the robot.
Return = number of cans collected.
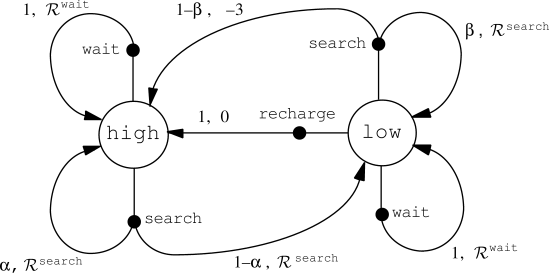
Example: the recycling robot MDP
\mathcal{S} = \{ \text{high}, \text{low} \}
\mathcal{A}(\text{high} ) = \{ \text{search}, \text{wait} \}
\mathcal{A}(\text{low} ) = \{ \text{search}, \text{wait}, \text{recharge} \}
R^{\text{search}} = expected number of cans while searching.
R^{\text{wait}} = expected number of cans while waiting.
R^{\text{search}} > R^{\text{wait}}
Example: the recycling robot MDP
\mathcal{S} = \{ \text{high}, \text{low} \}
\mathcal{A}(\text{high} ) = \{ \text{search}, \text{wait} \}
\mathcal{A}(\text{low} ) = \{ \text{search}, \text{wait}, \text{recharge} \}
R^{\text{search}} = expected number of cans while searching.
R^{\text{wait}} = expected number of cans while waiting.
R^{\text{search}} > R^{\text{wait}}
- The MDP is fully described by the following table:
| s | s' | a | p(s' | s, a) | r(s, a, s') |
|---|---|---|---|---|
| high | high | search | \alpha | \mathcal{R}^\text{search} |
| high | low | search | 1 - \alpha | \mathcal{R}^\text{search} |
| low | high | search | 1 - \beta | -3 |
| low | low | search | \beta | \mathcal{R}^\text{search} |
| high | high | wait | 1 | \mathcal{R}^\text{wait} |
| high | low | wait | 0 | \mathcal{R}^\text{wait} |
| low | high | wait | 0 | \mathcal{R}^\text{wait} |
| low | low | wait | 1 | \mathcal{R}^\text{wait} |
| low | high | recharge | 1 | 0 |
| low | low | recharge | 0 | 0 |
The policy
- The probability that an agent selects a particular action a in a given state s is called the policy \pi.
\begin{align} \pi &: \mathcal{S} \times \mathcal{A} \rightarrow P(\mathcal{S})\\ (s, a) &\rightarrow \pi(s, a) = P(a_t = a | s_t = s) \\ \end{align}
The policy can be deterministic (one action has a probability of 1, the others 0) or stochastic.
The goal of an agent is to find a policy that maximizes the sum of received rewards on the long term, i.e. the return R_t at each each time step.
This policy is called the optimal policy \pi^*.
\mathcal{J}(\pi) = \mathbb{E}_{\rho_\pi} [R_t] \qquad \pi^* = \text{argmax} \, \mathcal{J}(\pi)
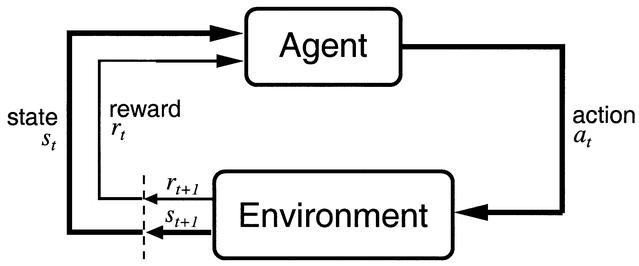
Goal of Reinforcement Learning
RL is an adaptive optimal control method for Markov Decision Processes using (sparse) rewards as a partial feedback.
At each time step t, the agent observes its Markov state s_t \in \mathcal{S}, produces an action a_t \in \mathcal{A}(s_t), receives a reward according to this action r_{t+1} \in \Re and updates its state: s_{t+1} \in \mathcal{S}.
The agent generates trajectories \tau = (s_0, a_0, r_1, s_1, a_1, \ldots, s_T) depending on its policy \pi(s ,a).
The return of a trajectory is the (discounted) sum of rewards accumulated during the sequence: R(\tau) = \sum_{t=0}^{T} \gamma^t \, r_{t+1}
The goal is to find the optimal policy \pi^* (s, a) that maximizes in expectation the return of each possible trajectory under that policy:
\mathcal{J}(\pi) = \mathbb{E}_{\tau \sim \rho_\pi} [R(\tau)] \qquad \pi^* = \text{argmax} \, \mathcal{J}(\pi)
Value Functions
A central notion in RL is to estimate the value (or utility) of every state and action of the MDP.
The value of a state V^{\pi} (s) is the expected return when starting from that state and thereafter following the agent’s current policy \pi.
The state-value function V^{\pi} (s) of a state s given the policy \pi is defined as the mathematical expectation of the return after that state:
V^{\pi} (s) = \mathbb{E}_{\rho_\pi} ( R_t | s_t = s) = \mathbb{E}_{\rho_\pi} ( \sum_{k=0}^{\infty} \gamma^k r_{t+k+1} |s_t=s )
Value Functions
V^{\pi} (s) = \mathbb{E}_{\rho_\pi} ( R_t | s_t = s) = \mathbb{E}_{\rho_\pi} ( \sum_{k=0}^{\infty} \gamma^k r_{t+k+1} |s_t=s )
The mathematical expectation operator \mathbb{E}(\cdot) is indexed by \rho_\pi, the probability distribution of states achievable with \pi.
Several trajectories are possible after the state s:
The state transition probability function p(s' | s, a) leads to different states s', even if the same actions are taken.
The expected reward function r(s, a, s') provides stochastic rewards, even if the transition (s, a, s') is the same.
The policy \pi itself is stochastic.
Only rewards that are obtained using the policy \pi should be taken into account, not the complete distribution of states and rewards.
Value Functions
- The value of a state is not intrinsic to the state itself, it depends on the policy:
V^{\pi} (s) = \mathbb{E}_{\rho_\pi} ( R_t | s_t = s) = \mathbb{E}_{\rho_\pi} ( \sum_{k=0}^{\infty} \gamma^k r_{t+k+1} |s_t=s )
- One could be in a state which is very close to the goal (only one action left to win game), but if the policy is very bad, the “good” action will not be chosen and the state will have a small value.

Source: https://www.carbonated.tv/sports/worst-open-goal-misses-in-football-gifs
Value Functions
The value of taking an action a in a state s under policy \pi is the expected return starting from that state, taking that action, and thereafter following the following \pi.
The action-value function for a state-action pair (s, a) under the policy \pi (or Q-value) is defined as:
\begin{align} Q^{\pi} (s, a) & = \mathbb{E}_{\rho_\pi} ( R_t | s_t = s, a_t =a) \\ & = \mathbb{E}_{\rho_\pi} ( \sum_{k=0}^{\infty} \gamma^k r_{t+k+1} |s_t=s, a_t=a) \\ \end{align}
- State- and action-value functions are linked to each other.
The V and Q value functions are inter-dependent
- The value of a state V^{\pi}(s) depends on the value Q^{\pi} (s, a) of the action that will be chosen by the policy \pi in s:
V^{\pi}(s) = \mathbb{E}_{a \sim \pi(s,a)} [Q^{\pi} (s, a)] = \sum_{a \in \mathcal{A}(s)} \pi(s, a) \, Q^{\pi} (s, a)
If the policy \pi is deterministic (the same action is chosen every time), the value of the state is the same as the value of that action (same expected return).
If the policy \pi is stochastic (actions are chosen with different probabilities), the value of the state is the weighted average of the value of the actions.
If the Q-values are known, the V-values can be found easily.
The V and Q value functions are inter-dependent
- Taking transition probabilities into account, one can obtain the Q-values when the V-values are known:
Q^{\pi}(s, a) = \mathbb{E}_{s' \sim p(s'|s, a)} [ r(s, a, s') + \gamma \, V^{\pi} (s') ] = \sum_{s' \in \mathcal{S}} p(s' | s, a) \, [ r(s, a, s') + \gamma \, V^{\pi} (s') ]
The value of an action depends on:
the states s' one can arrive after the action (with a probability p(s' | s, a)).
the value of that state V^{\pi} (s'), weighted by \gamma as it is one step in the future.
the reward received immediately after taking that action r(s, a, s') (as it is not included in the value of s').
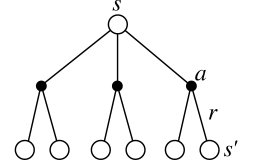
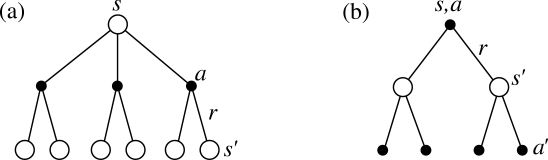
Bellman equation for V^{\pi}
- A fundamental property of value functions used throughout reinforcement learning is that they satisfy a particular recursive relationship:
\begin{aligned} V^{\pi}(s) &= \sum_{a \in \mathcal{A}(s)} \pi(s, a) \, Q^{\pi} (s, a)\\ &= \sum_{a \in \mathcal{A}(s)} \pi(s, a) \, \sum_{s' \in \mathcal{S}} p(s' | s, a) \, [ r(s, a, s') + \gamma \, V^{\pi} (s') ] \end{aligned}
This equation is called the Bellman equation for V^{\pi}.
It expresses the relationship between the value of a state and the value of its successors, depending on the dynamics of the MDP (p(s' | s, a) and r(s, a, s')) and the current policy \pi.
The interesting property of the Bellman equation for RL is that it admits one and only one solution V^{\pi}(s).
Bellman equation for Q^{\pi}
- The same recursive relationship stands for Q^{\pi}(s, a):
\begin{aligned} Q^{\pi}(s, a) &= \sum_{s' \in \mathcal{S}} p(s' | s, a) \, [ r(s, a, s') + \gamma \, V^{\pi} (s') ] \\ &= \sum_{s' \in \mathcal{S}} p(s' | s, a) \, [ r(s, a, s') + \gamma \, \sum_{a' \in \mathcal{A}(s')} \pi(s', a') \, Q^{\pi} (s', a')] \end{aligned}
which is called the Bellman equation for Q^{\pi}.
- The following backup diagrams denote these recursive relationships.
The optimal policy is greedy
When the policy is optimal \pi^*, the link between the V and Q values is even easier.
The V and Q values are maximal for the optimal policy: there is no better alternative.
- The optimal action a^* to perform in the state s is the one with the highest optimal Q-value Q^*(s, a).
a^* = \text{argmax}_a \, Q^*(s, a)
- By definition, this action will bring the maximal return when starting in s.
Q^*(s, a) = \mathbb{E}_{\rho_{\pi^*}} [R_t]
- The optimal policy is greedy with respect to Q^*(s, a), i.e. deterministic.
\pi^*(s, a) = \begin{cases} 1 \; \text{if} \; a = a^* \\ 0 \; \text{otherwise.} \end{cases}
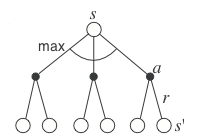
Bellman optimality equations
- As the optimal policy is deterministic, the optimal value of a state is equal to the value of the optimal action:
V^* (s) = \max_{a \in \mathcal{A}(s)} Q^{\pi^*} (s, a)
The expected return after being in s is the same as the expected return after being in s and choosing the optimal action a^*, as this is the only action that can be taken.
This allows to find the Bellman optimality equation for V^*:
V^* (s) = \max_{a \in \mathcal{A}(s)} \sum_{s' \in \mathcal{S}} p(s' | s, a) \, [ r(s, a, s') + \gamma \, V^{*} (s') ]
- The same Bellman optimality equation stands for Q^*:
Q^* (s, a) = \sum_{s' \in \mathcal{S}} p(s' | s, a) \, [r(s, a, s') + \gamma \max_{a' \in \mathcal{A}(s')} Q^* (s', a') ]
- The optimal value of (s, a) depends on the optimal action in the next state s'.
Obtaining the optimal policy from the optimal values
- V^* and Q^* are interdependent: one needs only to compute one of them.
V^* (s) = \max_{a \in \mathcal{A}(s)} \, Q^{*} (s, a)
Q^* (s, a) = \sum_{s' \in \mathcal{S}} \, p(s' | s, a) \, [r(s, a, s') + \gamma V^*(s') ]
- If you only have V^*(s), you need to perform a one-step-ahead search using the dynamics of the MDP:
Q^* (s, a) = \sum_{s' \in \mathcal{S}} \, p(s' | s, a) \, [r(s, a, s') + \gamma V^*(s') ]
and then select the optimal action with the highest Q^*-value.
- Using the V^*(s) values is called model-based: you need to know the model of the environment to act, at least locally.
Bellman optimality equations for V^* or Q^*?
- If you have all Q^*(s, a), the optimal policy is straightforward:
\pi^*(s, a) = \begin{cases} 1 \; \text{if} \; a = \text{argmax}_a \, Q^*(s, a) \\ 0 \; \text{otherwise.} \end{cases}
Finding Q^* makes the selection of optimal actions easy:
no need to iterate over all actions and to know the dynamics p(s' | s, a) and r(s, a, s').
for any state s, it can simply find the action that maximizes Q^*(s,a).
The action-value function effectively caches the results of all one-step-ahead searches into a single value: model-free.
At the cost of representing a function of all state-action pairs, the optimal action-value function allows optimal actions to be selected without having to know anything about the environment’s dynamics.
But there are N \times M equations to solve instead of just N…
Key idea of Reinforcement learning: Generalized Policy Iteration
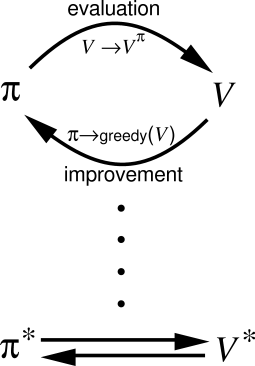
RL algorithms iterate over two steps:
Policy evaluation
For a given policy \pi, the value of all states V^\pi(s) or all state-action pairs Q^\pi(s, a) is calculated, either based on:
the Bellman equations (Dynamic Programming)
sampled experience (Monte-Carlo and Temporal Difference)
Policy improvement
- From the current estimated values V^\pi(s) or Q^\pi(s, a), a new better policy \pi is derived.
After enough iterations, the policy converges to the optimal policy (if the states are Markov).